PneuMesh: Pneumatic-driven Truss-based Shape Changing System
2021-2022
Media Package Download | Contact: Jianzhe Gu <jianzheg@andrew.cmu.edu>
PneuMesh realizes discrete digitization of form and morphing in robots designs. Utilizing variable geometry truss that is driven by air, PneuMesh allows both computational design and digital fabrication of complex shape and motion, democratizing the making of robots with expressive forms. PneuMesh robots can be future low-cost companion robots customized for and made by each individual.
Most of the complex robots designed by AI are still virtual characters and hard to build. The hardware solutions proposed here make the robots practical to be built.
By Jianzhe Gu, Yuyu Lin, Qiang Cui, Xiaoqian Li, Jiaji Li, Lingyun Sun, Fangtian Ying, Guanyun Wang, Lining Yao
In ACM Conference on Human Factors in Computing Systems (CHI '22) 2022 PDF | DOI | TALK | TUTORIAL
From transoceanic bridges to large-scale installations, truss structures have been known for their structural stability and shape complexity. In addition to the advantages of static trusses, truss structures have a large degree of freedom to change shape when equipped with rotatable joints and retractable beams. However, it is difficult to design a complex motion and build a control system for large numbers of trusses.
PneuMesh is a novel truss-based shape-changing system that is easy to design and build but still able to achieve a range of tasks. PneuMesh leverages computational simulation and AI technology to provide an air channel connection strategy and reconfigurable constraint design that drastically decreases the number of control units without losing the complexity of shape-changing.
We feel and interact with the world around us through the shapes and the morphing of the shapes. Pets, chairs, human bodies, they all have specific shapes and motions that are deeply coupled with their shapes. This combination of complex shapes and complex motions provides functions and conveys information, and are important for effective and rich interaction.





Variable geometry truss(VGT) is a structure that can be designed into a wide range of complex shapes, as well as motions. VGT is composed of linearly scalable beams formed into tetrahedron units. A collection of such units can approximate complex geometry. With change of the length of each beam, VGT geometry can deform into other shapes, as well as making complex motions.





Channel Grouping
With a traditional approach (left), it needs 67 control modules, including tubings and valves. In our work (right), we selectively group the beams into a few channels where all the beams in the same channel of the same color can be actuated at the same time, such that the number of control modules is greatly reduced, but it still enables the Truss to perform complex tasks.


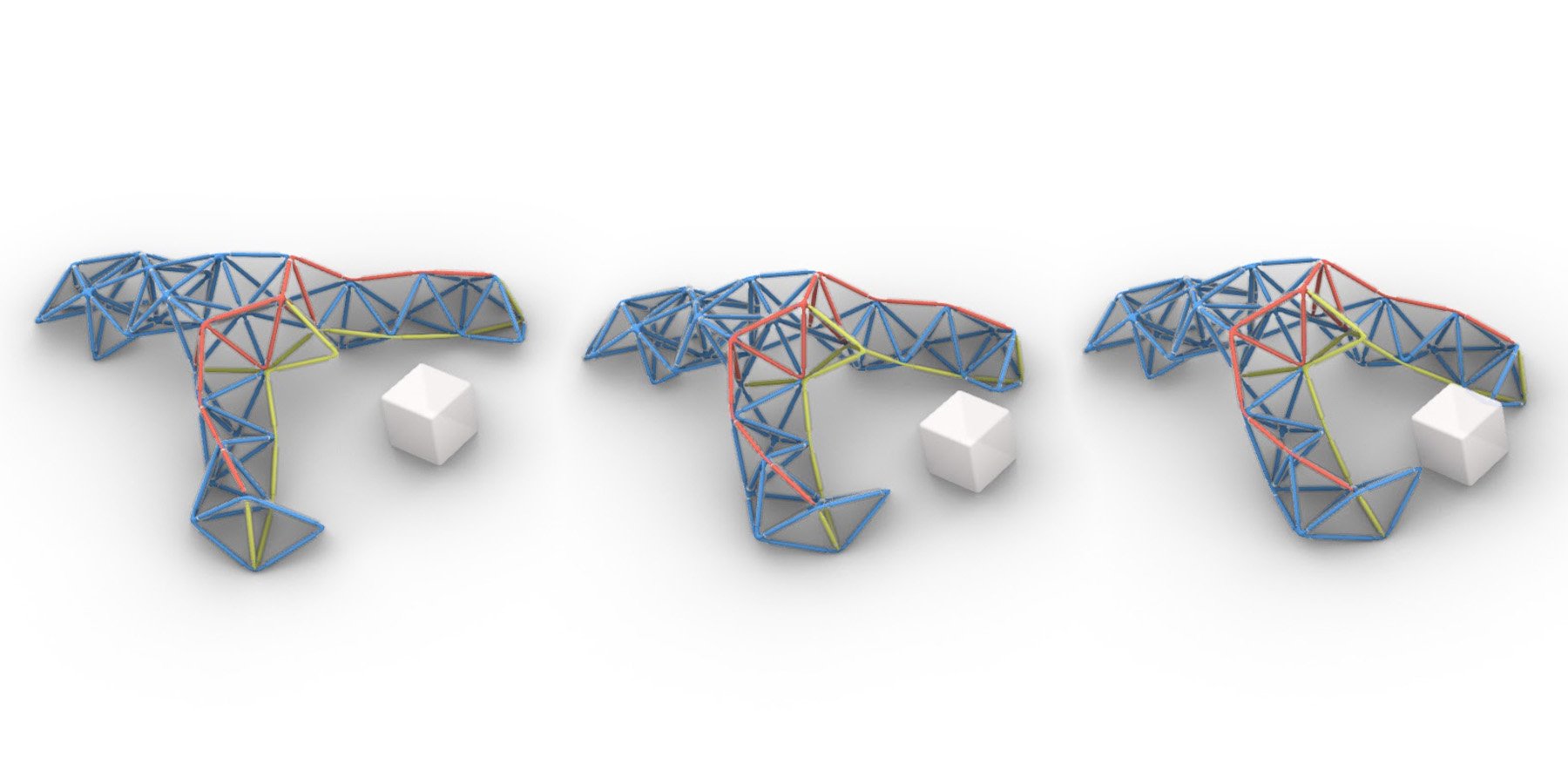
With the group channels, different control signals can be given to morph the shapes in different ways.
Multi-channel Joints Design and Optimization
We design the joint to let air meet at the same point but go to different channels independently. We developed a geometry optimization to address this question. We first initialize all the channels as straight lines that meet at the center of the joint. We represent each channel as a sequence of points and update the points’ positions based on the following energy.

The repulsion energy allows the channels to keep a certain distance between each other such that the air is separated. The smoothness energy allows the channels to stay smooth for a better 3D printing quality. The tension energy prevents channels from going out of the joint area. We then add the spherical shell and barb structures and create the joint model.


Contraction Ratio Control
A blocker structure that controls the contraction rate. There are three holes on the piston part where a blocker structure can snap onto the holes and stop the contraction.

Fabrication Instructions
When users are happy with the result and click export, the tool will automatically generate the models of the joints for 3D printing. Users will then get the basic units and assemble them into their design.


Morphing Robots and Beyond
We develop a design tool with real-time simulation to assist users in designing the shape and motion of truss-based shape- changing robots and devices. A design session with seven participants demonstrates that PneuMesh empowers users to design and build truss structures with a wide range of shapes and various functional motions.
Clicking each animation below brings you to the design file inside the web browser-based tool.

Dancing Bot

Living Flower I

Living Flower II

Running Dog
Dog Standing Up and Laying Down

Globe Fish

Crawling Lobster
Claw
Walking Bot

Walking Bot with Gait

Transformer Rocket I

Transformer Rocket II
Acknowledgment
This work is conducted at the Morphing Matter Lab, Carnegie Mellon University. A paper titled 'PneuMesh: Pneumatic-driven Truss-based Shape Changing System ' was recently published in ACM Conference on Human Factors in Computing Systems (CHI '22) , by Jianzhe Gu, Yuyu Lin, Qiang Cui, Xiaoqian Li, Jiaji Li, Lingyun Sun, Fangtian Ying, Guanyun Wang and Lining Yao.
This research is partially supported by the National Science Foundation grant ID 052184116.