Highly Dynamic Bistable Soft Actuator for Reconfigurable Multimodal Soft Robots

2023, 8, 2201259 (Jan 24)
Highly Dynamic Robust Bistable soft actuator
By Dinesh K. Patel, Xiaonan Huang, Yichi Luo, Mrunmayi Mungekar, M. Khalid Jawed, Lining Yao*, Carmel Majidi*.
Freely access the paper online | PDF
Honor: “Best of Advanced Materials Technologies 2022”
News: ScienceDaily | Futurity | EurekAlert | newswise l nanowerk l TechXplore l Interesting Engineering l ECplanet l Today Headline l CMU news l wordpress.com l ACM l Hackster.io l SoylentNews
Collaborative Institutes:
Morphing Matter Lab, Human-Computer Interaction Institute, Carnegie Mellon University
Soft Machines Lab, Department of Mechanical Engineering, Carnegie Mellon University
The Robotics Institute, Carnegie Mellon University
University of California, Los Angeles


To survive in the natural world, many animals have evolved to perform more than one mode of locomotion. These locomotion includes crawling and swimming, crawling and jumping, crawling and rolling, etc.
A highly dynamic and compact soft bistable actuator is presented as a paper in Advanced Materials Technologies. The bistable actuator is fast, robust, stable and power efficient. A amphibious robot, a reconfigurable caterpillar robot and a multimodal crawler are demonstrated here. We foresee the potential application of this class of bistable soft actuators to other domains like wearable robotics, haptics, and shape-reconfigurable apertures for dynamically tunable communication.


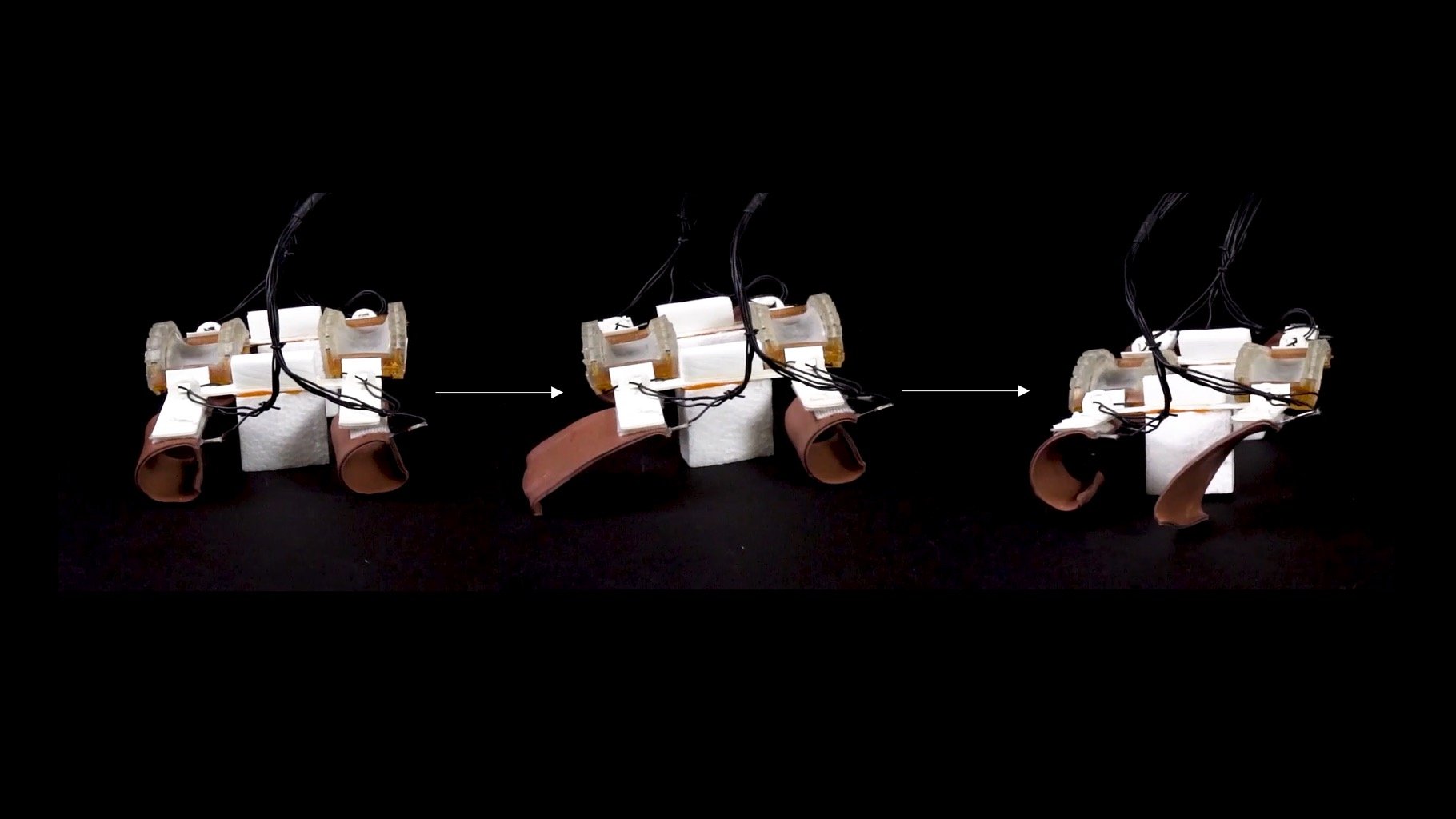
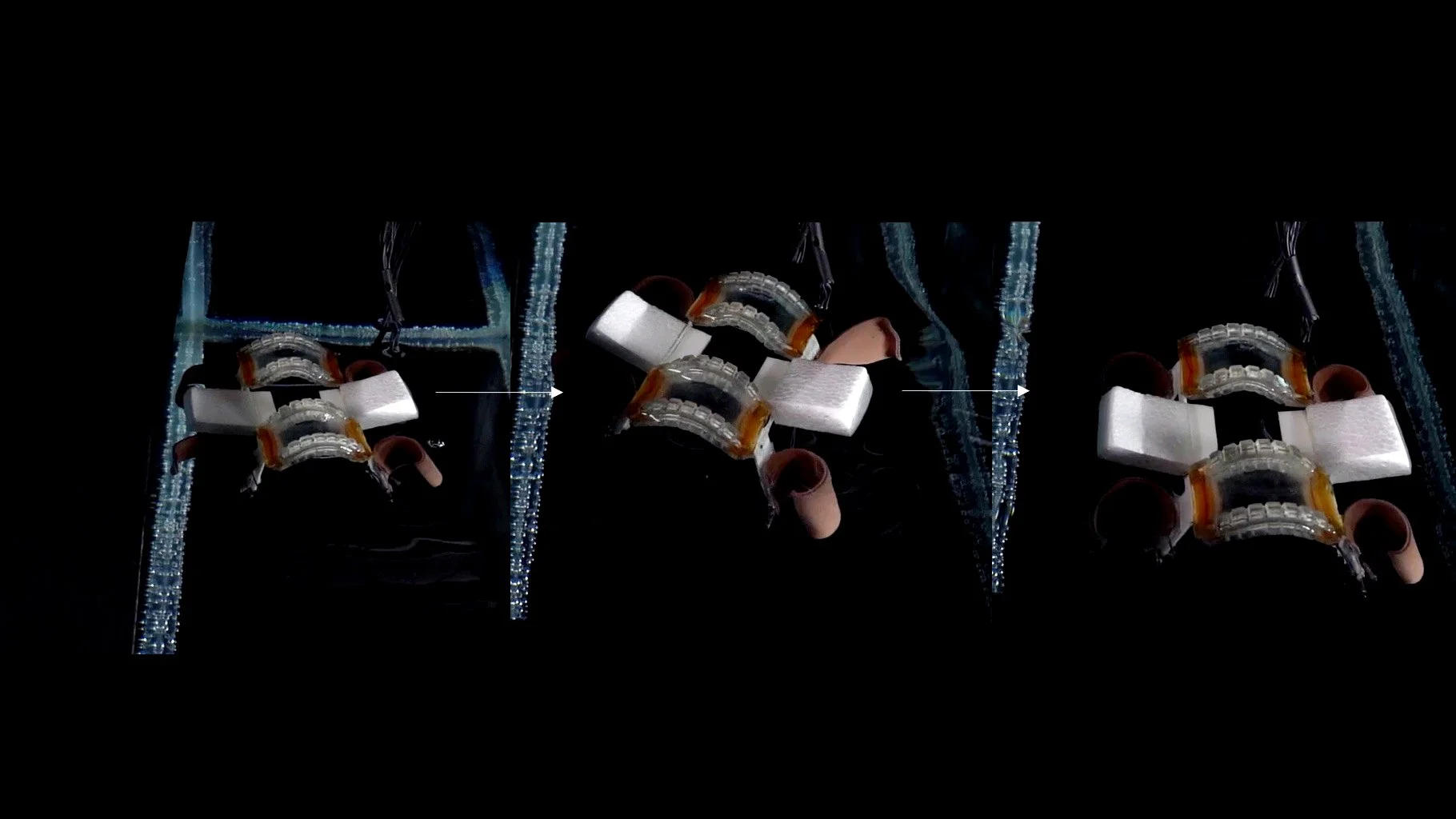
An amphibious robot is demonstrated here using two bistable actuator and four curled SMA driven soft limbs. The robot can swiftly transition from walk mode to swim mode and swim mode to walk mode by triggering the embedded SMA coils. The bistable actuator acts as the main body of the robot and also acts as a bridge between the soft limbs. The bistability facilitates the transformation of a quadruped crawler to frog-like swimmer and vice-versa. The crawler crawls towards the pool by by activating the soft limbs in symmetric manner and finally falls into the pool. The bistable actuators are activated at 11.1 V for 0.2 s (ta) and the crawler transform into the swimmer. The transition results in transforming soft limbs to propellers which will facilitates swimming. The soft limbs are activated in series with activation time of 0.3 s and cooling time of 1 s resulting the robot to swim on other side of pool.
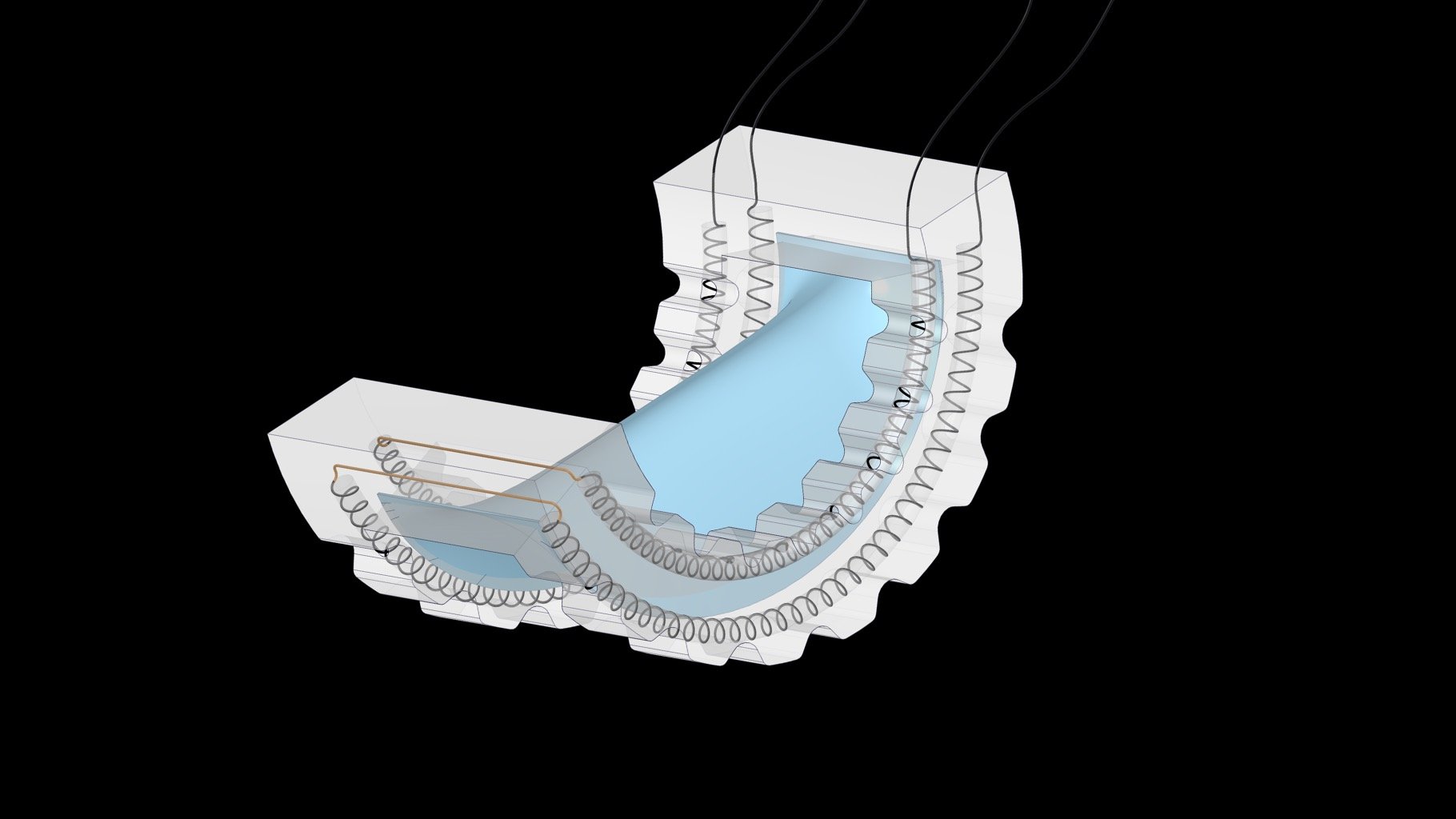
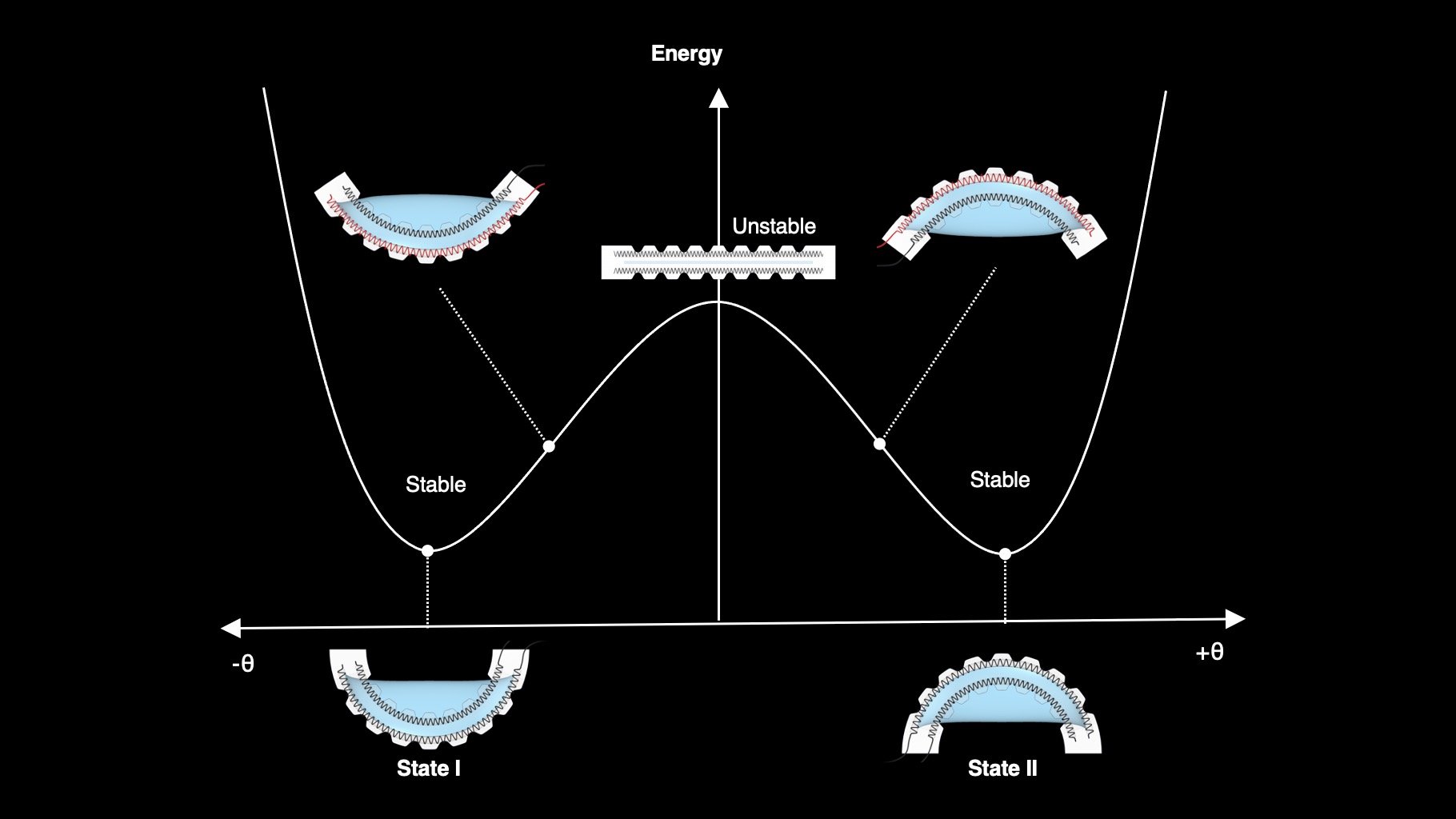
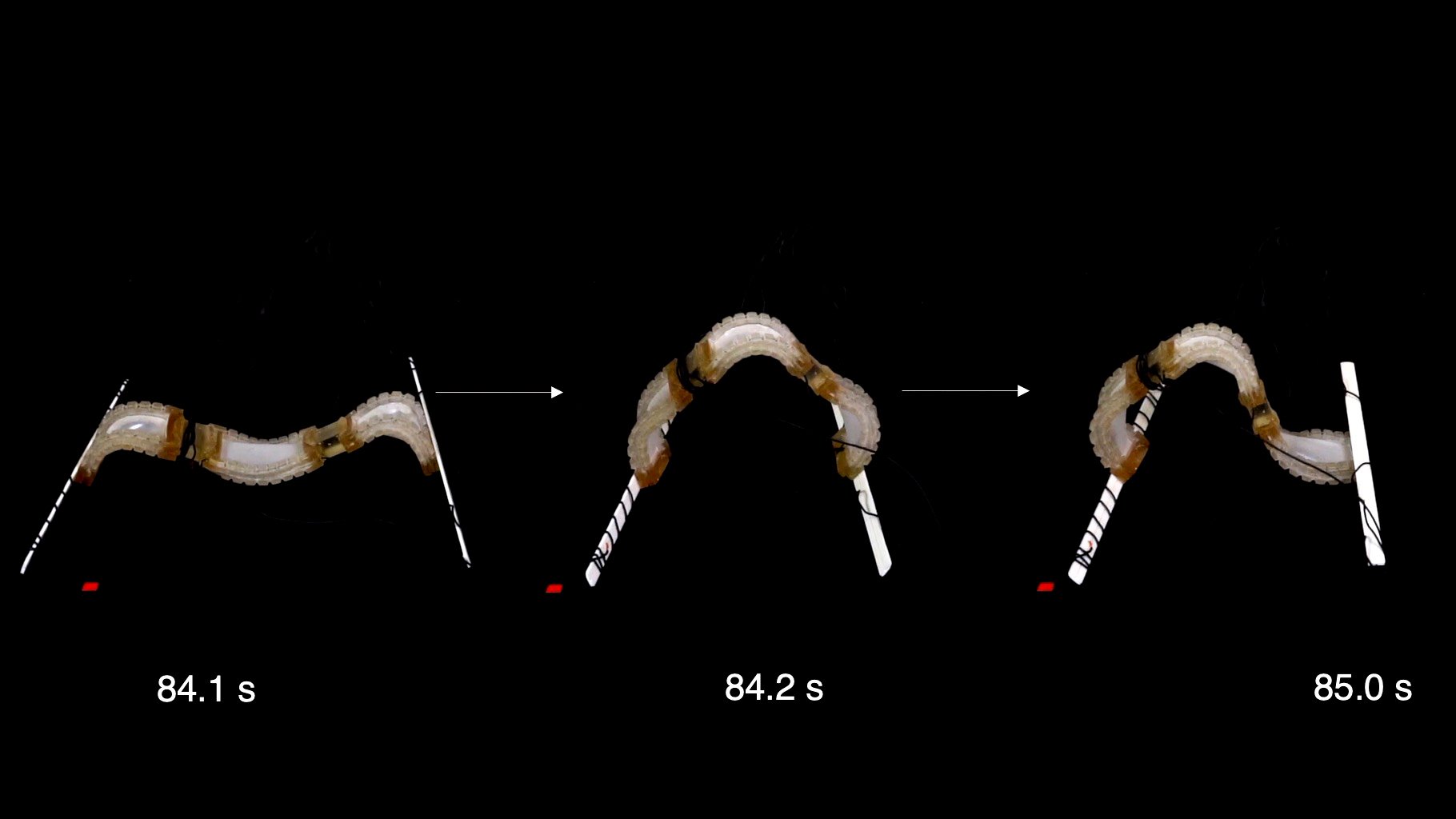
A highly dynamic and compact soft bistable actuator that uses a snap-through instability to swiftly switch between two oppositely curved states. The bistable actuator is powered through thermal activation of embedded shape memory alloy (SMA) coils and is capable of achieving a snap-through transition within 0.2 and 0.3 s in air and water, when powered at 11.1 V.
Fast response
Maximum frequency test is performed under which the bistable actuator transforms swiftly at 1 Hz under a condition without exterior loading (ta = 0.1 s and tc = 0.9 s) for 100 times actuation from state I to state II and vice versa.

Cyclical Activation
Under cyclical testing, the bistable actuator was able to produce a constant force for 580 cycles and constant curvature at each states even after 350 cycles.

Robustness test
A rider rides a bicycle (total around 112 Kg) over the bistable actuator causing it to be struck twice, i.e., once by front wheel and second time by rear wheel, respectively. After the strike the actuator transform swiftly between the two states
Compression test
Actuator was able to survive under 70 and 80 % strain corresponding to load of 61 and 388 N. After 90 % strain, with compression load of 1039 N, the actuator could undergo few actuation cycles until the SMA spring pops out due to polymer failure.
Model and Simulation
Initial curvature from experiments, analytic modelling and numerical simulation have been evaluated for the bistable actuators.
An Amphibious Robot
It can swiftly transform from crawler to frog-like swimmer and vice versa to maneuver from land to water to land and so on.

A Reconfigurable Caterpillar-Inspired Robot
A reconfigurable robot inspired by caterpillars that is capable of both crawling with a sinusoidal wave gait and curling its body to swiftly roll away is demonstrated. Three bistable actuators connected in series by two 3D printed connectors and two beams to balance the robot at the end. The middle and front bistable actuator is activated in series resulting into crawling motion. Once the crawler approaches the decline, the middle actuator is activated resulting in formation of closed arc and the robots rolls down.


Here, we demonstrating the amphibious robot in crawling on the land like a quadruped towards the waterbody using soft limbs. Once it reaches the water, its transforms swiftly to frog-like swimmer by activation of the two bistable frames. The activation time is in the order of 0.2-0.3 s at 11.1 V. The soft limbs turns be propellers and the robot swims on the water body towards the shore. It can reconfigure to crawler from swimmer once it reaches other side shore.


Manufacturing
It is fabricated by embedding SMA springs in 3D printing elastomeric frames followed by sandwiching these frames between a prestretch membrane.
Details of the fabrication, gait control can be found here.

To Summarize, the soft bistable actuator exhibits the following enabling properties:
relatively low requirement on power and control electronics;
ability to maintain various stable shapes without the need for continuous energy consumption;
rapid actuation for swift transition between different modes of locomotion.

Check out the full project video below:
Acknowledgment
Rahn USA corporation for providing Genocure TPO and Allnex, USA for providing Ebecryl 113 (epoxy aliphatic acrylate, EAA) and Ebecryl 8413 (aliphatic urethane di-acrylate, AUD) samples. Sathvik Divi to help for mechanical work setup using high speed camera. Di Wu for helping in designing the cover art.
Funding
US National Science Foundation IIS-CAREER-2047912 (Lining Yao)
The AFOSR Multidisciplinary University Research Initiative FA9550-18- 1-0566; Program Manager: Dr. Ken Goretta (Carmel Majidi)
Credit
Project Execution:
Experimental & project Lead: Dinesh K. Patel (dineshpa@andrew.cmu.edu )
Project co-lead: Xiaonan Hunag, Analytic Modeling: Yichi Luo
FEA Simulation: Mrunmayi Mungekar and Prof. M. Khalid Jawed Supervising: Prof. Lining Yao, Prof. Carmel Majidi
Collaborative Institutes
Morphing Matter Lab, Human-Computer Interaction Institute, Carnegie Mellon University (Leading)
Soft Machines Lab, Department of Mechanical Engineering, Carnegie Mellon University (Leading)
The Robotics Institute, Carnegie Mellon University
Department of Mechanical & Aerospace Engineering, University of California, Los Angeles